Research
Highlighted

Towards Autonomous Navigation of Neuroendovascular Tools for Timely Stroke Treatment via Contact-aware Path Planning
arXiv
·
25 Feb 2025
·
arxiv:2502.15971
Neurovascular tool planning
Hybrid Tendon and Ball Chain Continuum Robots for Enhanced Dexterity in Medical Interventions
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
01 Oct 2023
·
doi:10.1109/IROS55552.2023.10341686
Magnetic ball chain robots for cardiac interventions.

Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungs
Communications Engineering
·
27 Jul 2023
·
doi:10.1038/s44172-023-00098-9
Robot navigation and design based on pre-operative imaging.
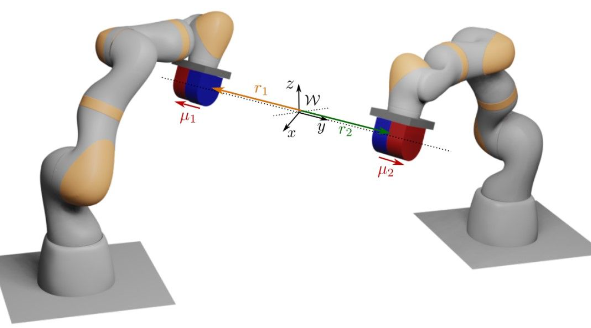
Collaborative Magnetic Manipulation via Two Robotically Actuated Permanent Magnets
IEEE Transactions on Robotics
·
01 Apr 2023
·
doi:10.1109/TRO.2022.3209038
Dexterous magnetic manipulation using robotically-acuated permanent magnets.
All
2025
Few-Shot Magnet Localization Using Sim-to-Real Transfer Learning
IEEE Robotics and Automation Letters
·
01 Dec 2025
·
doi:10.1109/LRA.2025.3623010
Towards Autonomous Navigation of Neuroendovascular Tools for Timely Stroke Treatment via Contact-aware Path Planning
arXiv
·
25 Feb 2025
·
arxiv:2502.15971
2024
Magnetic Ball Chain Robots for Cardiac Arrhythmia Treatment
IEEE Transactions on Medical Robotics and Bionics
·
01 Nov 2024
·
doi:10.1109/TMRB.2024.3465828
Breathing Compensation in Magnetic Robotic Bronchoscopy via Shape Forming
IEEE Robotics and Automation Letters
·
01 Oct 2024
·
doi:10.1109/LRA.2024.3426385
Hybrid trajectory planning of two permanent magnets for medical robotic applications
The International Journal of Robotics Research
·
23 Jul 2024
·
doi:10.1177/02783649241264844
2023
Hybrid Tendon and Ball Chain Continuum Robots for Enhanced Dexterity in Medical Interventions
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
01 Oct 2023
·
doi:10.1109/IROS55552.2023.10341686
Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungs
Communications Engineering
·
27 Jul 2023
·
doi:10.1038/s44172-023-00098-9
Closed Loop Static Control of Multi-Magnet Soft Continuum Robots
IEEE Robotics and Automation Letters
·
01 Jul 2023
·
doi:10.1109/LRA.2023.3274431
Six-Degree-of-Freedom Localization Under Multiple Permanent Magnets Actuation
IEEE Robotics and Automation Letters
·
01 Jun 2023
·
doi:10.1109/LRA.2023.3268588
A Magnetically-Actuated Coiling Soft Robot With Variable Stiffness
IEEE Robotics and Automation Letters
·
01 Jun 2023
·
doi:10.1109/LRA.2023.3264770
Collaborative Magnetic Manipulation via Two Robotically Actuated Permanent Magnets
IEEE Transactions on Robotics
·
01 Apr 2023
·
doi:10.1109/TRO.2022.3209038
2022
Patient-Specific Magnetic Catheters for Atraumatic Autonomous Endoscopy
Soft Robotics
·
01 Dec 2022
·
doi:10.1089/soro.2021.0090
Magnetic Soft Continuum Robots With Braided Reinforcement
IEEE Robotics and Automation Letters
·
01 Oct 2022
·
doi:10.1109/LRA.2022.3191552
2021
On the Observability and Observer Design on the Special Orthogonal Group Based on Partial Inertial Sensing
IEEE Transactions on Automatic Control
·
01 Oct 2021
·
doi:10.1109/TAC.2020.3047553
2020
Challenges of continuum robots in clinical context: a review
Progress in Biomedical Engineering
·
03 Aug 2020
·
doi:10.1088/2516-1091/ab9f41
2019
Adaptive Dynamic Control for Magnetically Actuated Medical Robots
IEEE Robotics and Automation Letters
·
01 Oct 2019
·
doi:10.1109/LRA.2019.2928761
Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated With a Single Permanent Magnet: A Dynamic Control Approach
IEEE Robotics and Automation Letters
·
01 Apr 2019
·
doi:10.1109/lra.2019.2894907
2018
Dynamic Control of Cable Driven Parallel Robots with Unknown Cable Stiffness: a Joint Space Approach
2018 IEEE International Conference on Robotics and Automation (ICRA)
·
01 May 2018
·
doi:10.1109/icra.2018.8460822
2016
Design, Realization and Experimental Evaluation of a Haptic Stick for Shared Control Studies
IFAC-PapersOnLine
·
01 Jan 2016
·
doi:10.1016/j.ifacol.2016.10.465